深圳先进院集成所柔软材料表面爬行机器人研究获新成果
近日,在国家自然科学基金委员会-深圳市人民政府机器人基础研究中心,深圳市科技创新委员会项目资助下,深圳先进院集成所智能仿生中心经过长时间努力,基于Clothbot原型样机成功研究出了其运动控制与姿态调节算法。相关成果Movement Control and Attitude Adjustment of Climbing Robot on Flexible Surfaces (《可在柔软材料表面爬行的机器人运动控制与姿态调节算法研究》)发表在自动化与控制系统顶级期刊IEEE Transactions on Industrial Electronics (IF=7.168)上(DOI:10.1109/TIE.2017.2764870)。
可穿戴的机器人是机器人研究领域的重要分支之一,对于促进新型医疗与现代军事作战有重要的意义。在该领域内准确性与鲁棒性是现存的两大技术难点,难点之一在于与柔性材料接触,精确的系统建模难以实现,难点之二在于难以建立鲁棒的系统控制方法及所携带硬件控制器的计算能力受限。
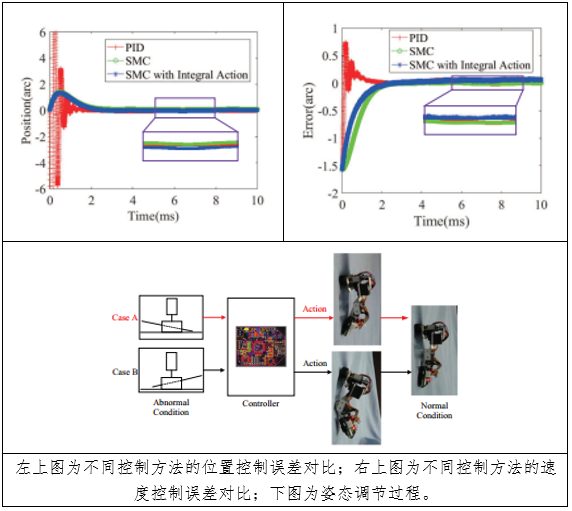
文章作者吴新宇研究员、周翊民副研究员和博士研究生刘佳经过长期调研与实践,成功研究出了用于柔性材料的可穿戴爬行机器人的控制算法,该方法可实现其驱动装置位置控制稳定阶段RMSE=0.432和速度控制稳定阶段RMSE=0.505;同时算法可主动调节其机器人尾部倾角,进而调节夹持机构的夹持量,防止因机器人夹持量增大,卡死在柔性材料表面或者因机器人夹持量减小,脱离柔性材料表面。
吴新宇研究团队是国际上最早研究可穿戴爬行机器人的科研团队之一,也取得了丰硕的研究成果,研制出的三代样机分别命名为Clothbot(2012年),Rubbot(2013年),Clothbot- (2017年) 。相关成果System and Design of Clothbot: a Robot for Flexible Clothes Climbing(《Clothbot:一种柔性材料表面爬行机器人系统设计》)发表在2012年机器人领域顶级会议IEEE International Conference on Robotics and Automation(ICRA, IEEE机器人与自动化国际会议)上;Path Planning for Clothes Climbing Robots on Deformable Clothes Surface (《可变形柔性表面爬行机器人路径规划研究》)与Rubbot: Rubbing on Flexible Loose Surfaces(《Rubbot:一种柔性材料爬行机器人》)分别发表在2012年、2013年机器人领域顶级会议IEEE International Conference on Intelligent Robots and Systems(IROS,IEEE智能机器人与系统国际会议)上。此外,理论成果Clothbot- : Dynamical Grasping and Climbing on Soft Cloth也发表在机器人领域的国际会议上。

智能仿生研究中心成立于2006年,由国际著名机器人专家徐扬生院士创建并担任中心主任,吴新宇研究员担任执行主任。中心致力于服务机器人、医疗和康复机器人、智能系统及微型磁控特种机器人等方面的前沿研究。中心牵头建设了广东省机器人与智能系统重点实验室、广东省机器人与智能系统工程技术研究中心及深圳智能机器人工程实验室,与香港中文大学(深圳)共同建设机器人与智能制造国家地方联合工程实验室。中心牵头成立国内首家机器人协会—深圳市机器人协会,牵头组织成立广东机器人产业技术创新联盟。